
�L���j�[�́w�~�j���{�b �g�V�X�e���x

�摜:�O�H�d�@MELFA RV-2AJ���p����
�@ ���݁A���{�b�g�́A���܂������̐i���𐋂��A�X�ɍ��x�ȓ��������ڎw���Đi���������Ă��܂��B
�@ �������A�V�X�e���Ƃ��ăg�[�^���o�����X���A�ǍD�łȂ��ꍇ������͂��ł��B
�@���_�F���S��E�E�E�@�ߏ�80W���郂�[�^�[���g�p���郍 �{�b�g�ɋ`���t��
�@���{�b�g���S��́A���[�N�̃T�C�Y���Ɠ��e�ɂ���ẮA��Ǝ҂ƃ��{�b�g�Ƃ̋����������A
������I�ōH����̃l�b�N�ƂȂ�ꍇ������܂��B
�@���S��Ɏg�p����X�y�[�X�������n���ɂ͏o���܂���B
�@�u�~�j���{�b�g�v�E�E�E�S��80W�ȉ����[�^�[���g�p����ėp�������߃��{�b�g
�@�l�Ԃƃ��{�b�g�Ƃ̋������߂Â�������S���̍����u�~�j���{�b�g�v
�@���ʂɃp���[������Ȃ��G�R�V�X�e���������\�ȁu�~�j���{�b�g�v
�@���Ђ́A�g�[�^���o�����X�̗ǂ��V�X�e���\�z�\���u�~�j���{�b�g�V�X�e���v���āE�������܂��B�@
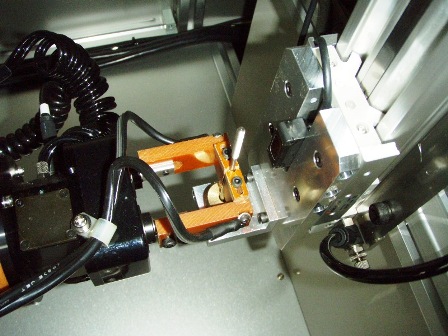
�@ �@�����@����P�F�X�e�����X�ǒ[�n�ڃ~�j���{�b�g�V�X�e���@����
�@�@�@�@�@�n�ڏ�Ԃ̓���Đ��͂�����
�@�@�X�e�����X�̊ǂɐc����}�����A�ǒ[���s�h�f�n�ڂ���n�ڃ��{�b�g�V�X�e���ł��B
�@�@�ǂƐc���e�X�̃p�[�c�t�B�[�_�𐧌䂵�A�ǂɐc����}�����܂��B
�@�@�ǂɐc�����}�����ꂽ��ԂŁA���{�b�g�O�̃��[�N��o���ɍ~��Ă��܂��B
�@�@
�@�@�@��o���|�A�g�[�`���|�B�g���C�ƂR�����I�ɔėp���{�b�g�����[�N���ړ����܂��B�@
�@�@
�@�n�ڏ����E��������E�e��^�C�}�ݒ���s���܂��B
�@�p�l����ł̊e����ƂƂ��ɁA���Y�������ȂǁA���݂̏�Ԃ��m�F�ł��܂��B
�@�@�@�@�@�@�@�@�@�@�@���[�N��o���g��@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�g�[�`���g��
�@ �@
�@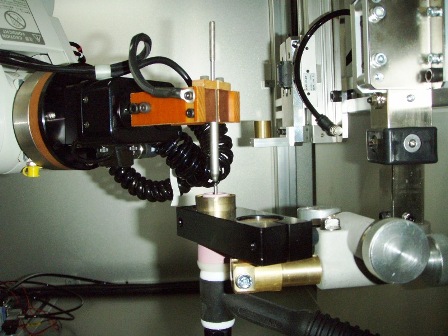
�@�@ ���[�N���o�p�r�[���Z���T�ɂăp�[�c�Z�b�e�B���O��Ԃ��m�F���A���H���̃g�[�`���ֈړ����A�s�h�f�n�ڂ�ݒ�f�[�^�ɂčs���܂��B
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�g�[�`�Œ莮�̃V���v���\���̂��߁A���j�^�J������t���e��
�@ �@
�@
�@�@�����@����Q�F���^��C�p�~�j���{�b�g�V�X�e���@����
�@�@�Z���T�ɂ����^�`���F�����A�Z���~�b�N�R�[�e�B���O�܂������h�z���܂��B
�@�@
�@�@
�@�@
�@�@
�@ �@�� ���[�U�a�̂��v�]�E���ɂ��\���E�d�l�́A�傫���قȂ�܂��B
�@�@�� �܂��́A�����k�������B
· �L���j�[�@�z�[���y�[�W�ɂ��ǂ�